Adaptive Constraint Tightening for Learning-Augmented NMPC
Duration: Feb 2026 – Present
Tools Used:
- Simulation Gazebo
- Python
- Gaussian Process Models
Summery:
Drones can follow a planned path with impressive precision until they speed up. At higher velocities, forces like aerodynamic drag and rotor wash start behaving in ways that basic physics models don't fully capture, causing the drone to drift from where the software expects it to be. This project builds a control system that accounts for that uncertainty rather than ignoring it.
The approach works in two parts. First, a machine learning model runs in the background, watching how the drone actually moves versus how it was expected to move, and building a picture of where the errors tend to grow. Second, the flight controller uses that picture to shrink its own safety boundaries in real time giving the drone a tighter margin to operate within when errors are predicted to be large, and relaxing those margins when flight is more predictable. The result is a system that is both safer and more efficient than one that assumes a worst-case scenario at all times.
All development and testing is currently being done in simulation using professional robotics software, as part of research project in mechanical engineering at San Diego State University
The Problem: Dynamics Uncertainty in High-Speed UAV Flight
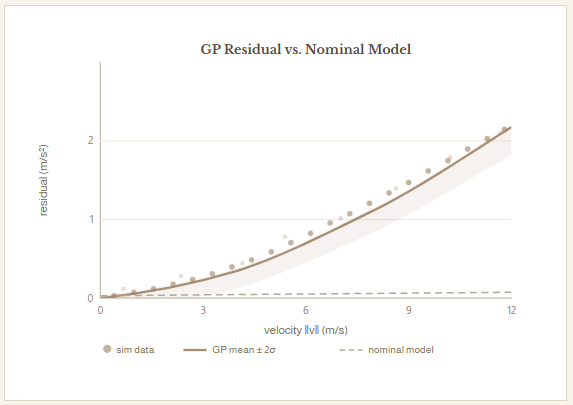
Standard NMPC controllers rely on first-principles physics models of a quadrotor. At high velocities and under aerodynamic disturbances, these models accumulate significant residual errors causing constraint violations and degraded tracking performance.
This project develops a learning-augmented NMPC framework that uses a Gaussian Process to model those residual dynamics online, then automatically tightens state and input constraints as a function of the drone's current velocity ensuring robust safety guarantees even as the learned model is applied.
How the Framework Fits Together
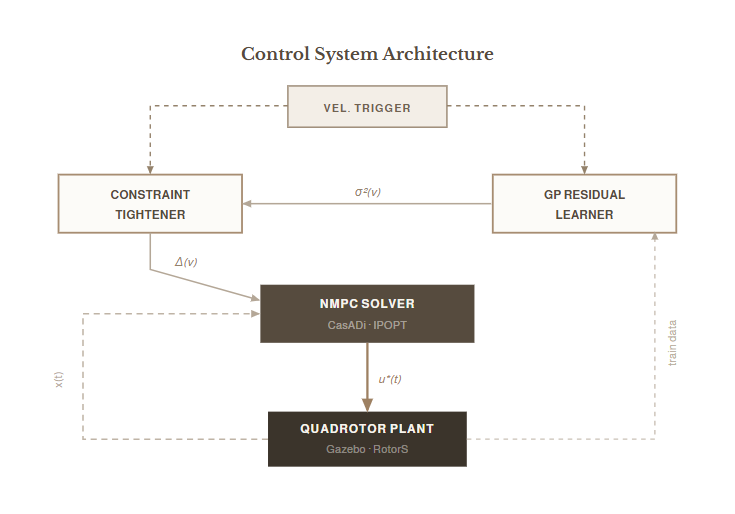
The controller pipeline has three tightly integrated layers. The GP Residual Learner runs in a background thread, updating its posterior estimate from flight data. The Constraint Tightener reads the GP's uncertainty output and computes tightened constraint sets. The NMPC Solver then optimizes over the horizon subject to those shrunk constraints.
A velocity trigger gates the constraint update only activating GP-based tightening once the quadrotor exceeds a threshold speed where aerodynamic errors become non-negligible. This keeps solver latency minimal at low speeds.
Velocity-Triggered Adaptive Constraint Tightening
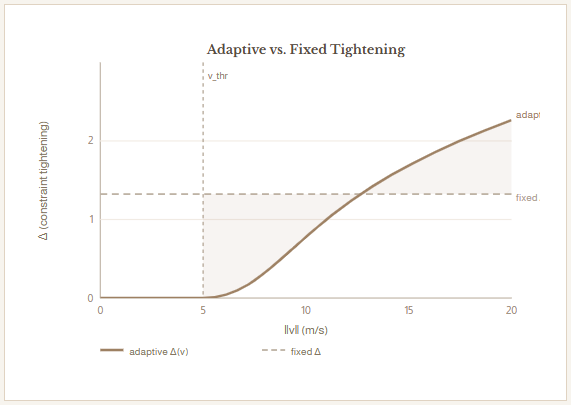
Classical robust NMPC tightens constraints by a fixed set-valued bound derived from worst-case disturbance assumptions. This is overly conservative at low speeds and potentially insufficient at high speeds where aerodynamic effects spike.
This work replaces that fixed bound with a velocity-dependent tightening term Δ(v) computed from the GP posterior variance. When ‖v‖ drops below a threshold vmin, the GP update is skipped entirely to save compute. Above that threshold, the tightening term grows with GP uncertainty giving tighter safety margins exactly where the nominal model is least reliable.
ROS + Gazebo + RotorS Pipeline
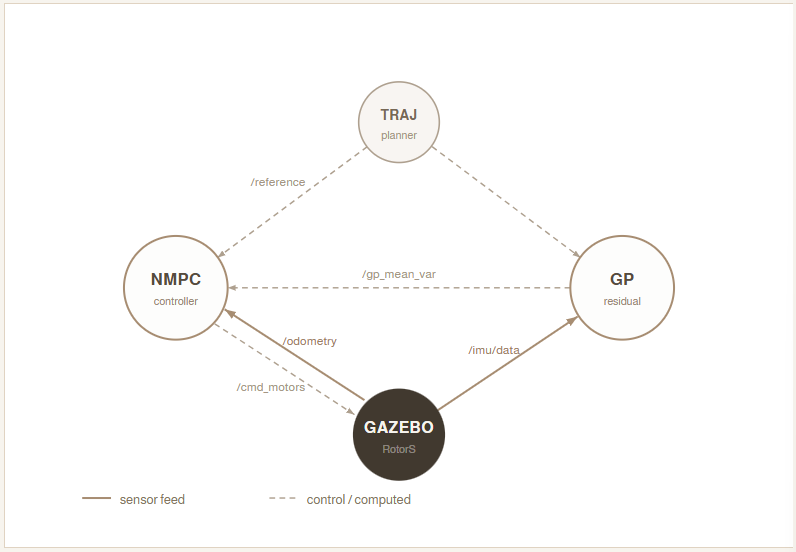
All validation is conducted in simulation using Gazebo with the RotorS multi-rotor plugin, interfaced through ROS. The simulation models full 6-DOF rigid body dynamics plus aerodynamic drag and rotor wake effects.
The NMPC solver and GP learner run as separate ROS nodes, communicating over topics at 100 Hz. Logged flight data from simulation runs is used to train the GP offline before being loaded for closed-loop testing.
Duration: Spring 2026 Present
GP Residual Modeling
A Gaussian Process trained on flight residuals captures velocity-correlated aerodynamic errors not covered by the nominal rigid-body model, providing both a mean correction and a calibrated uncertainty estimate.
Constraint Tightening
Extends Dincer et al. (2024) constraint tightening theory from linear to nonlinear, learning-augmented systems a challenging step that requires bounding GP posterior variance propagation through nonlinear dynamics.
Velocity Trigger Logic
A novel triggering condition gates GP-based constraint updates to speed regimes where aerodynamic residuals are significant, reducing online computational load without sacrificing safety margins.
Simulation Validation
Closed-loop trajectory tracking experiments in Gazebo/RotorS evaluate constraint satisfaction rates and RMSE versus a baseline NMPC controller under various aggressiveness levels.
Project Summary:
This research project addresses a fundamental challenge in UAV control: how to maintain formal safety guarantees when the vehicle's dynamics are partially unknown and velocity-dependent. By fusing Gaussian Process learning with robust NMPC constraint tightening, the framework adapts its conservatism in real time being permissive at low speeds and robustly cautious at high speeds where the nominal model most frequently fails.
The theoretical contribution extends prior work on linear robust MPC to nonlinear, learning-augmented systems. The practical contribution is a ROS-integrated pipeline validated in Gazebo/RotorS that demonstrates measurable improvements in both tracking accuracy and constraint satisfaction over a baseline NMPC controller.